Aquatic Micro Air Vehicle
The AquaMAV is designed to collect water samples by diving into the water from flight (video). It uses folding wings, a custom built compressed gas
jet to launch out of the water, and a novel single-actuator gearbox to drive a propeller in both water and air. I received the ‘Best UK PhD in Robotics’ award for
my work on the AquaMAV, and the project has recently been turned into a book
Team: Raphael Zufferey, Sophie Armanini, Alejandro Ortega Ancel, Yu Herng Tan, Mirko Kovac

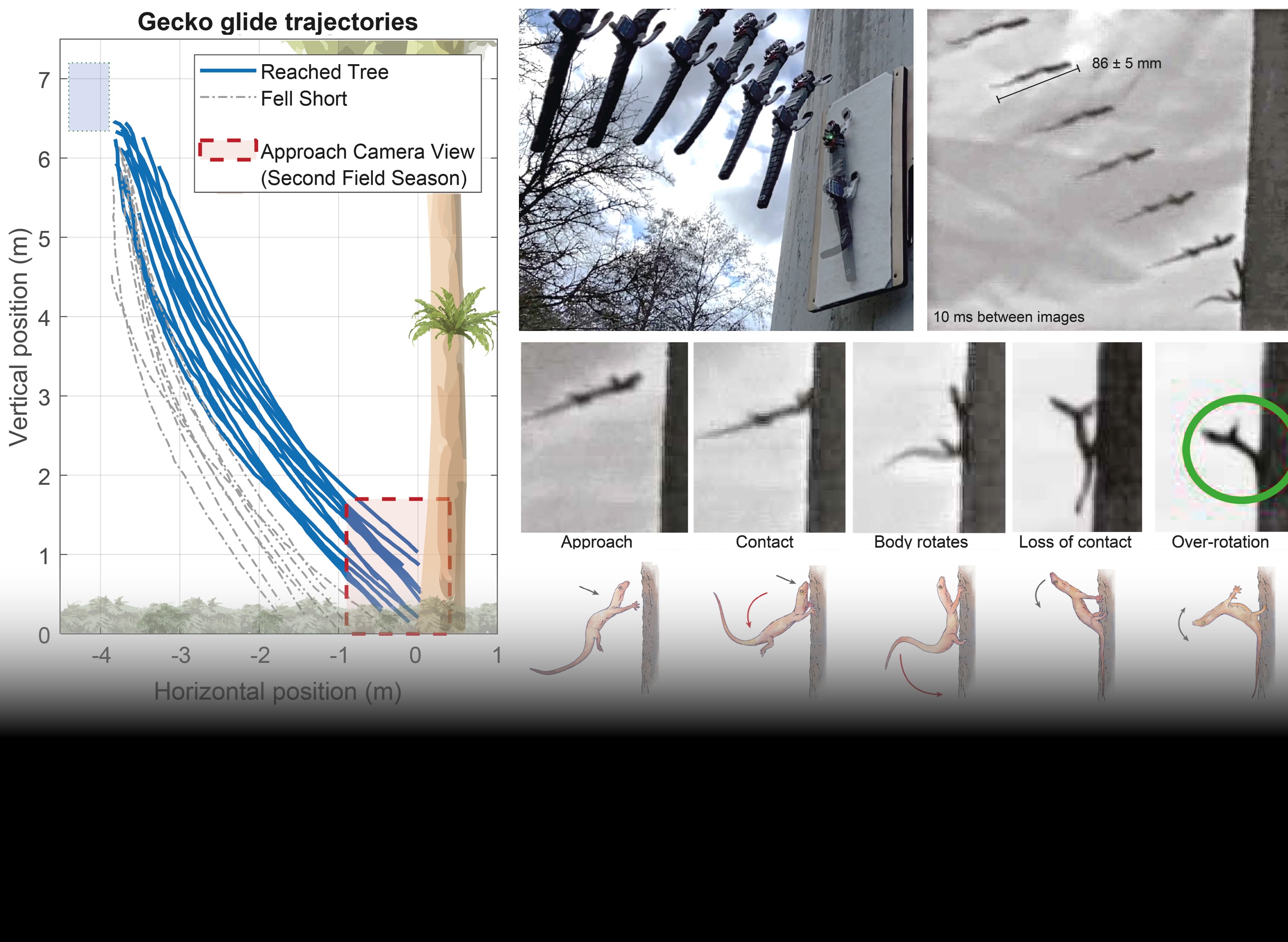
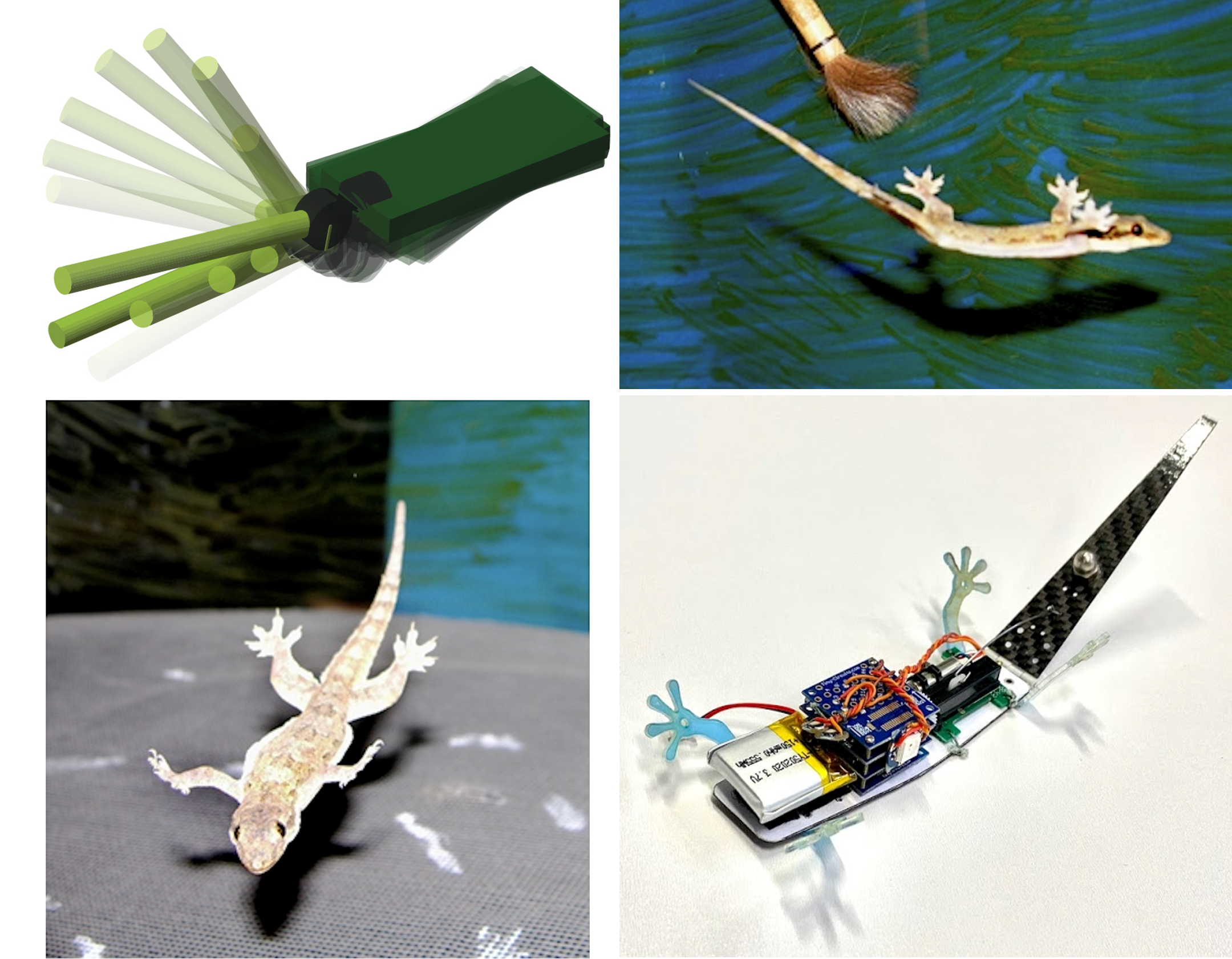
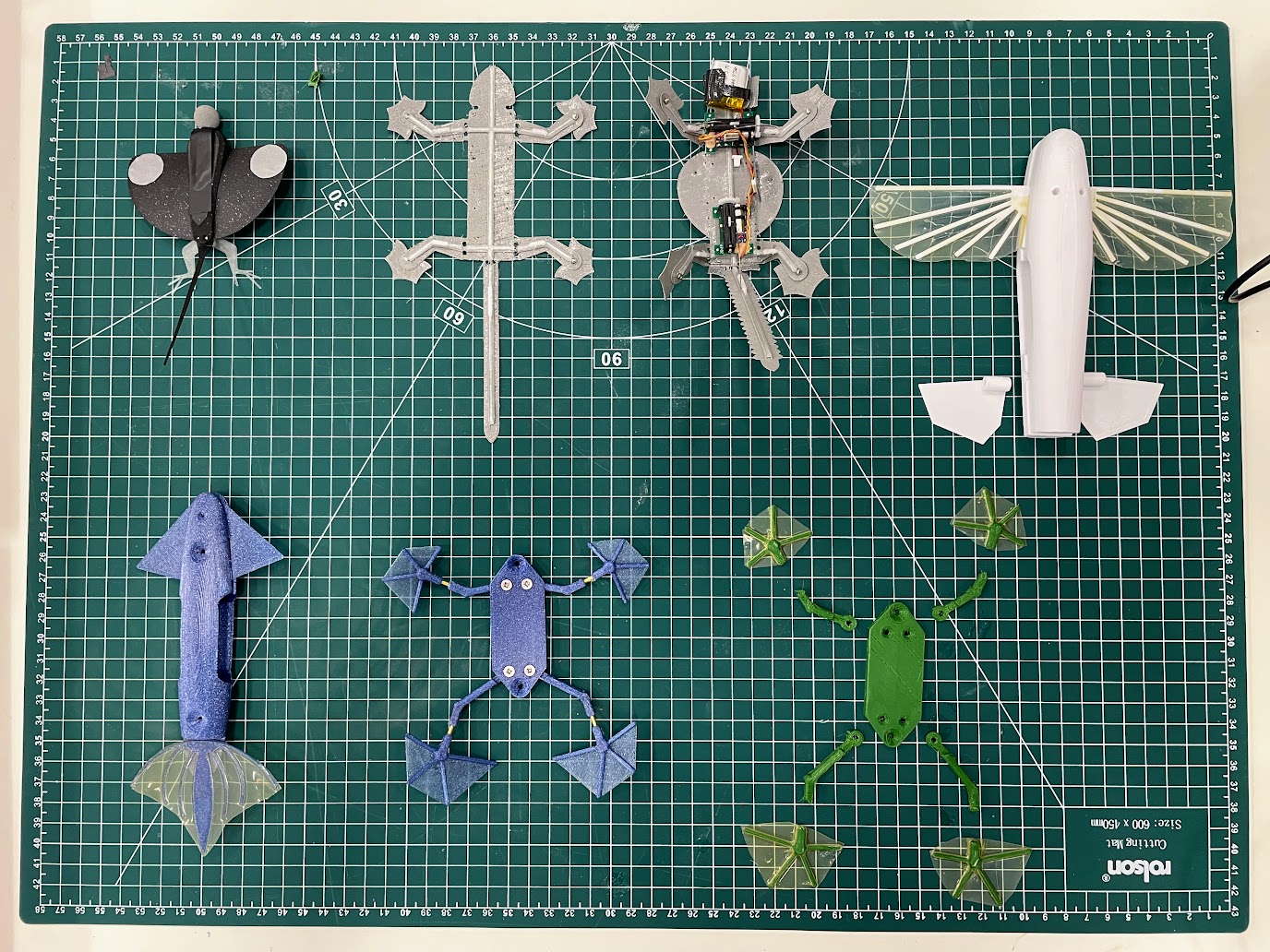
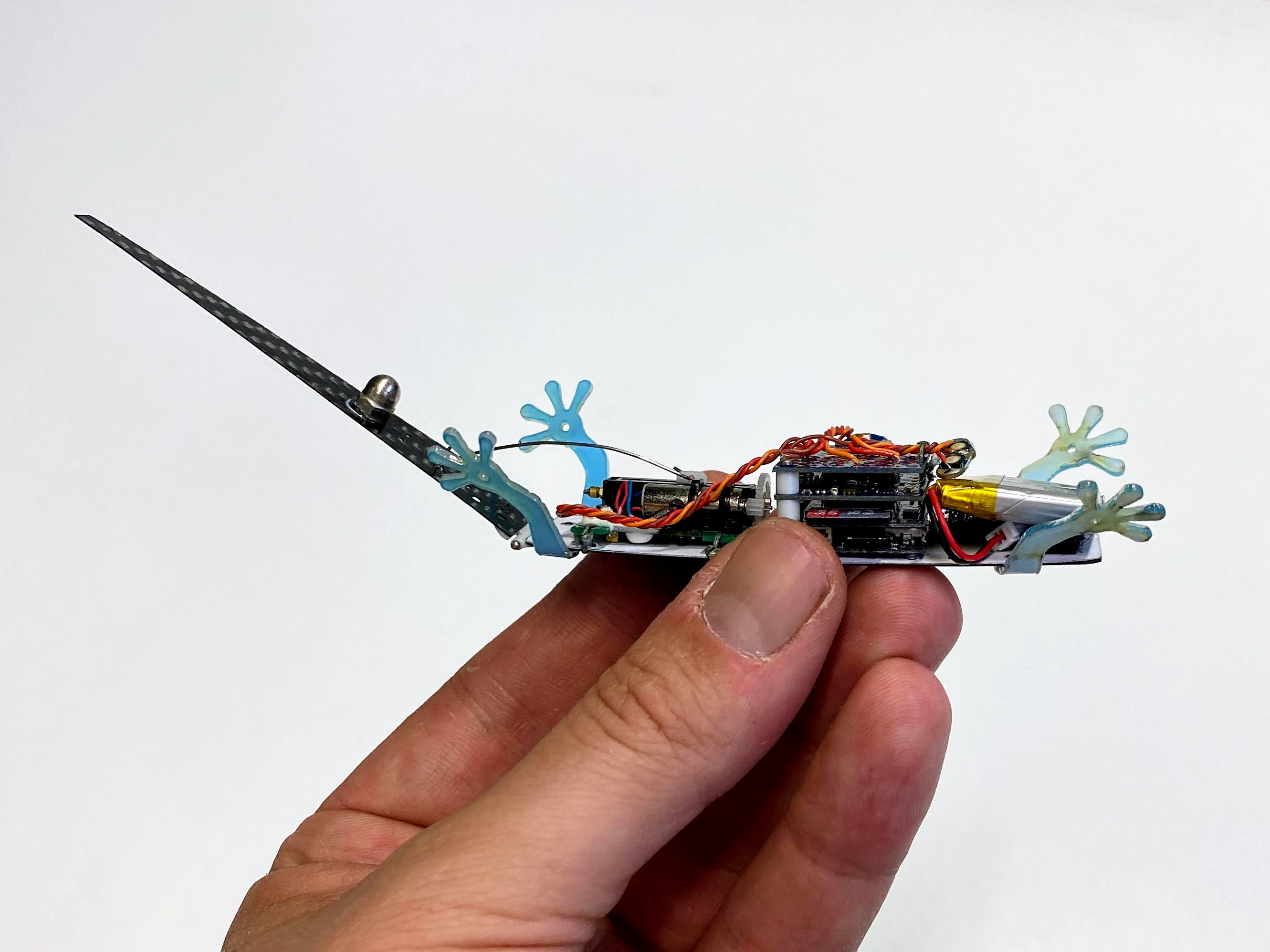
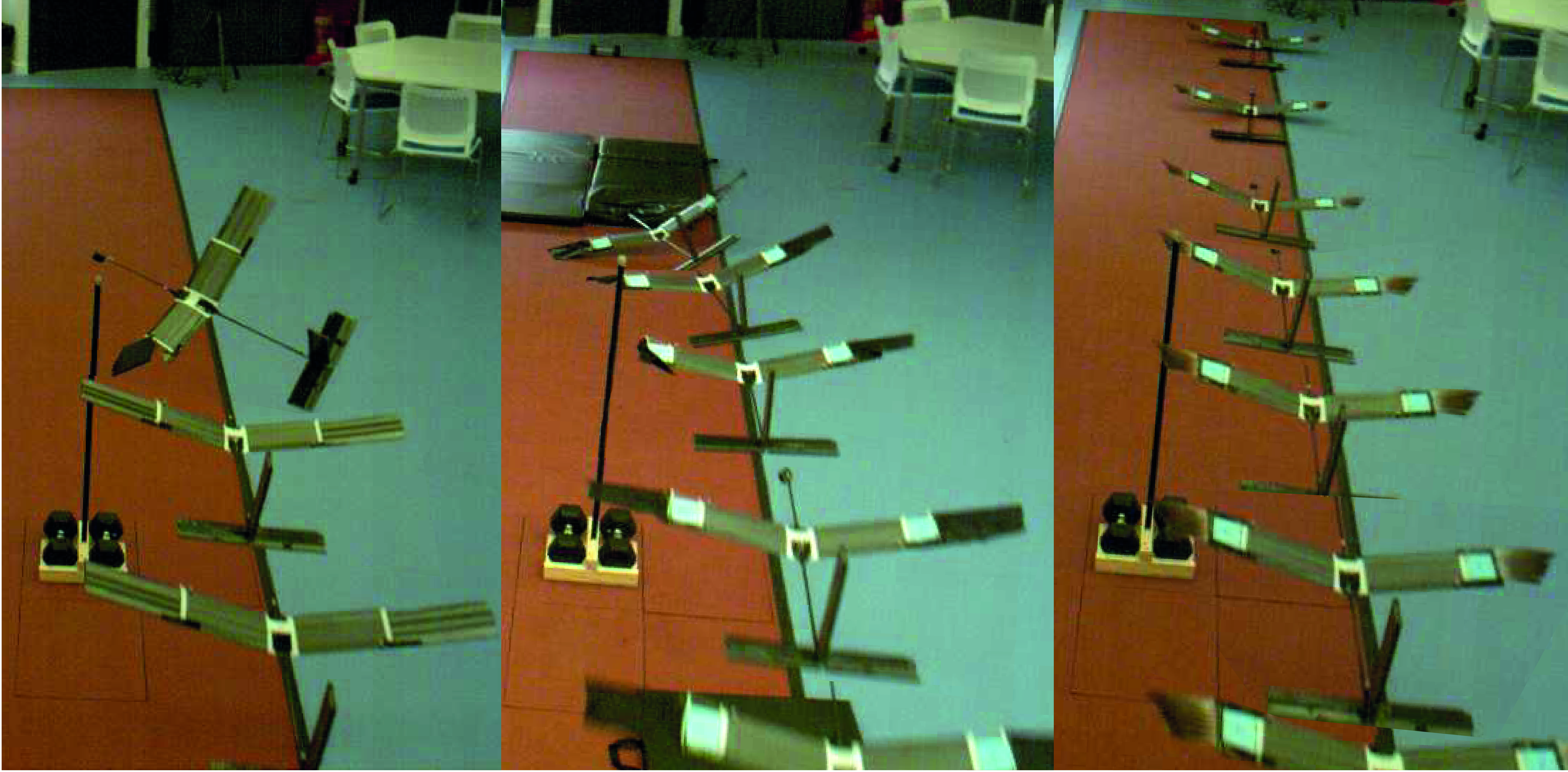
Gecko Crash Landings
Why do gliding geckos crash land head-first into tree trunks? A team of biologists at UC Berkeley posed this question after watching gliding geckos travel
between trees in the Singaporean rainforest. To help answer it I built a soft robotic
gecko and catapulted it at a wall hundreds of times. You can watch a
summary video, or read the paper in Nature Communications Biology.
Team: Ardian Jusufi, Greg Byrnes, Robert J. Full

Crophopper
Crophopper is a unique rotorcraft developed for smart agriculture as part of an ESA-funded startup company, Haybeesee. The robot uses a jumping mechanism to conserve energy and is capable of imaging weeds at a single-leaf level. I was the company’s principal engineer for the first two years after seed funding.
Team: Fred Miller, Lalit P., Tomaz W.

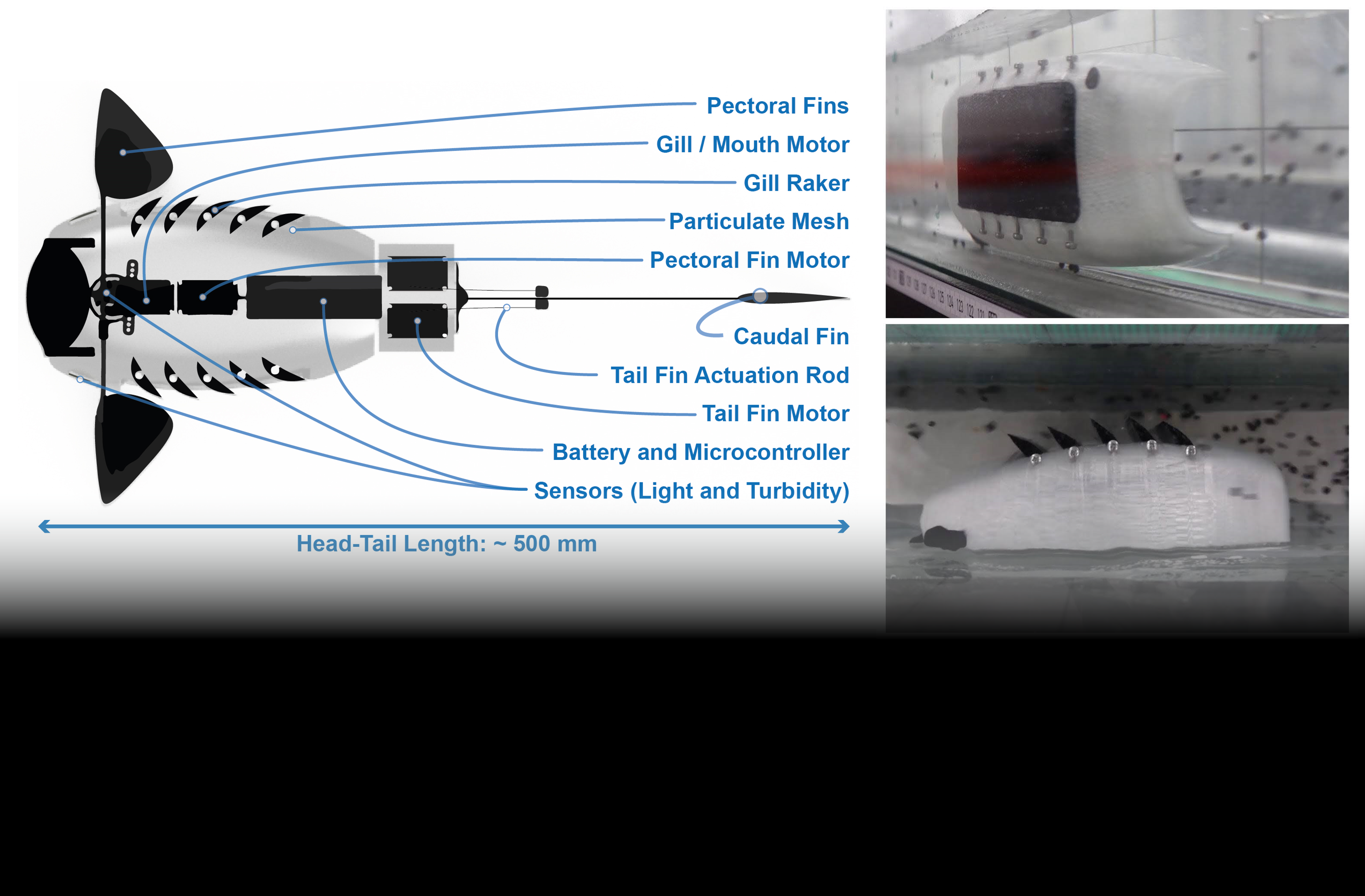
Gillbert
Each year, I run The Natural Robotics Contest, a chance for the public to submit ideas for bioinspired robots that
we turn into a real, working robot. The winning entry in 2022 was ‘Gillbert’ a fish that collects microplastic pollution, submitted by Eleanor Mackintosh (video).

Team Peryton
I supervise my university’s UAS team, who each year design and build autonomous aircraft with onboard computer vision for the IMechE’s international UAS competition.
Team Peryton were grand champions at the contest in both 2021 and 2022, and best in the UK in 2023 (video).
Team: Too many to list here, check out instagram.com/uav_team_peryton for the latest!
Gecko Aerodynamics
Geckos are remarkably capable in air, despite no obvious adaptations for flight. To learn
how they control their attitude in mid air, I used a shooting-method trajectory
optimisation to explore the interplay of aerodynamics and inertial forces
(summary video / paper).

Explosive Jet
Getting out of the water requires a lot of power. This project gets that power by reacting
calcium carbide with water and combusting the resulting acetylene gas, and only needs a fraction of a gram to pull off a 30m jump out of water!
(summary video / paper 1 / paper 2).
Team: Raphael Zufferey, Grant Kennedy, Andre Farhina, Sophie Armanini, Alejandro Ortega Ancel, Mirko Kovac
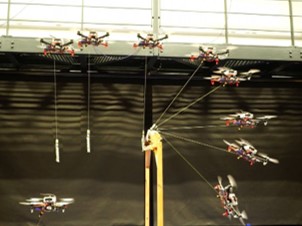
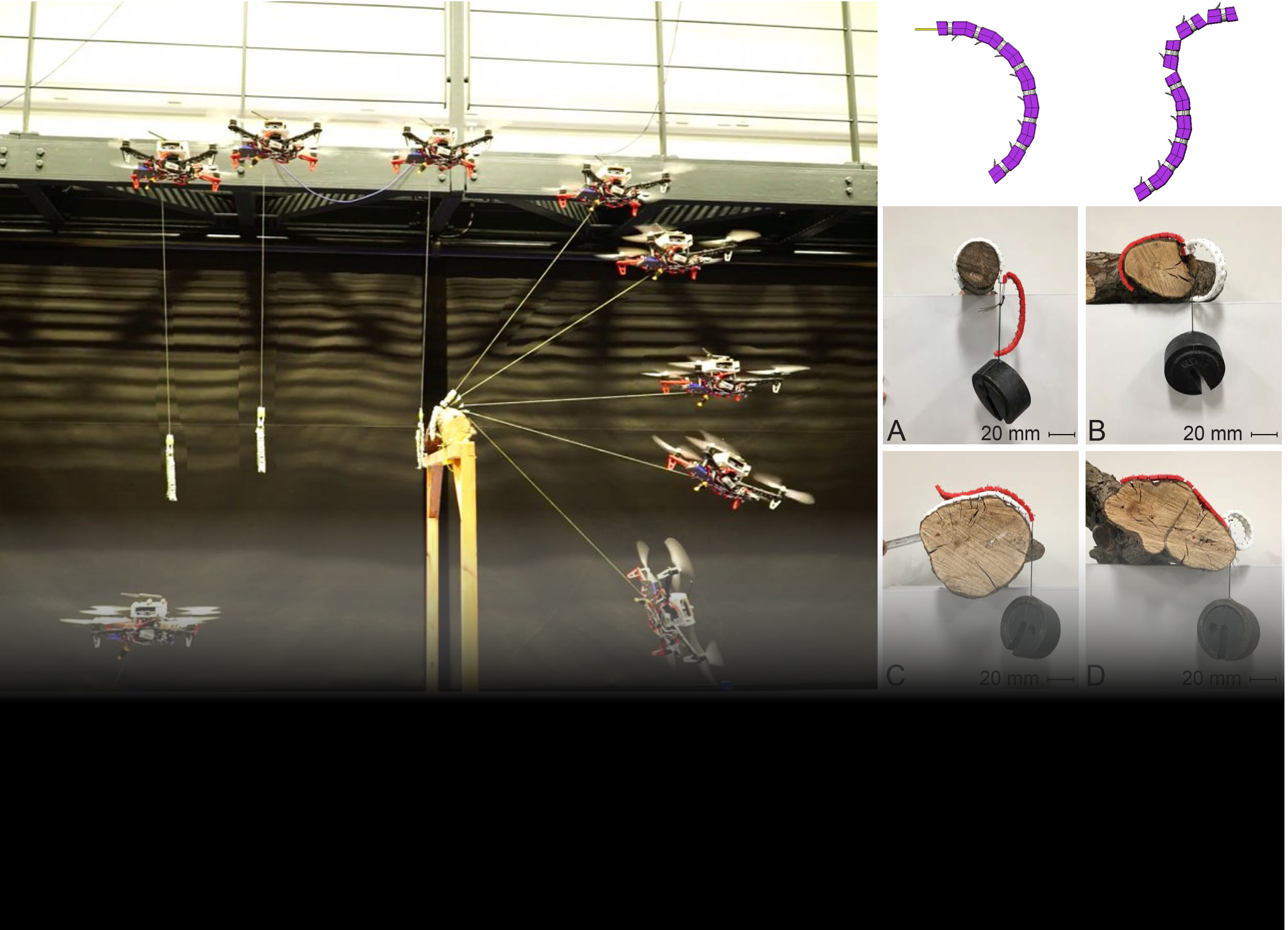
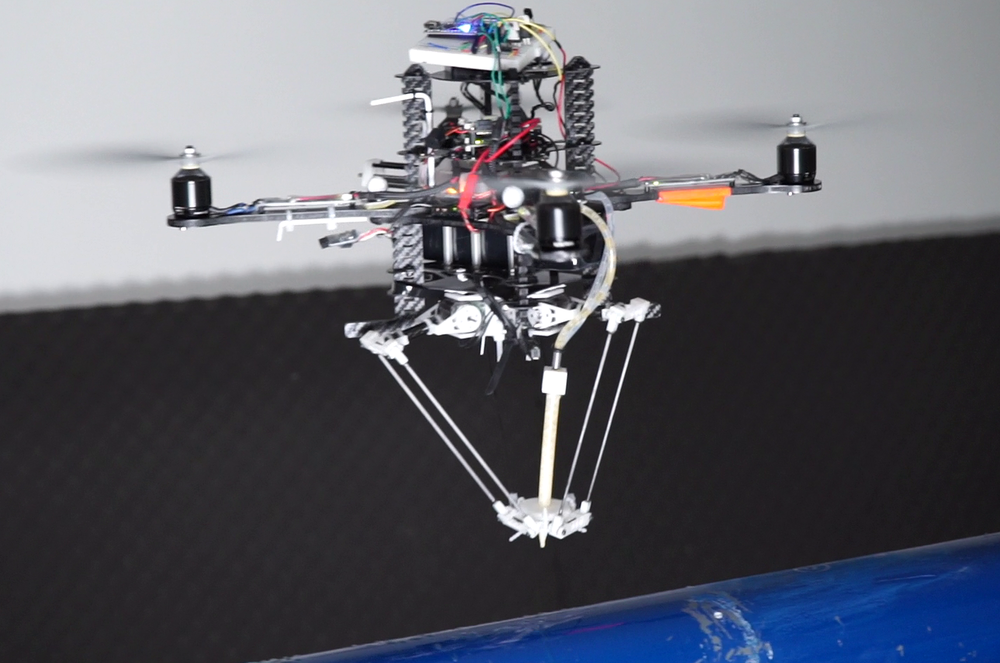
Grappling Drone
This drone was developed to allow better access to tree canopies. It uses a microspine grapple that can passively grip branches
of any size with up to 1,000 N of force, but still releases with ease. When attached to a drone, it makes perching and take off from branches simple and reliable.
(paper) (summary video)
Team: Hai-Nguyen Nguyen, Brett Stephens, Alberto Navarro-Rubio

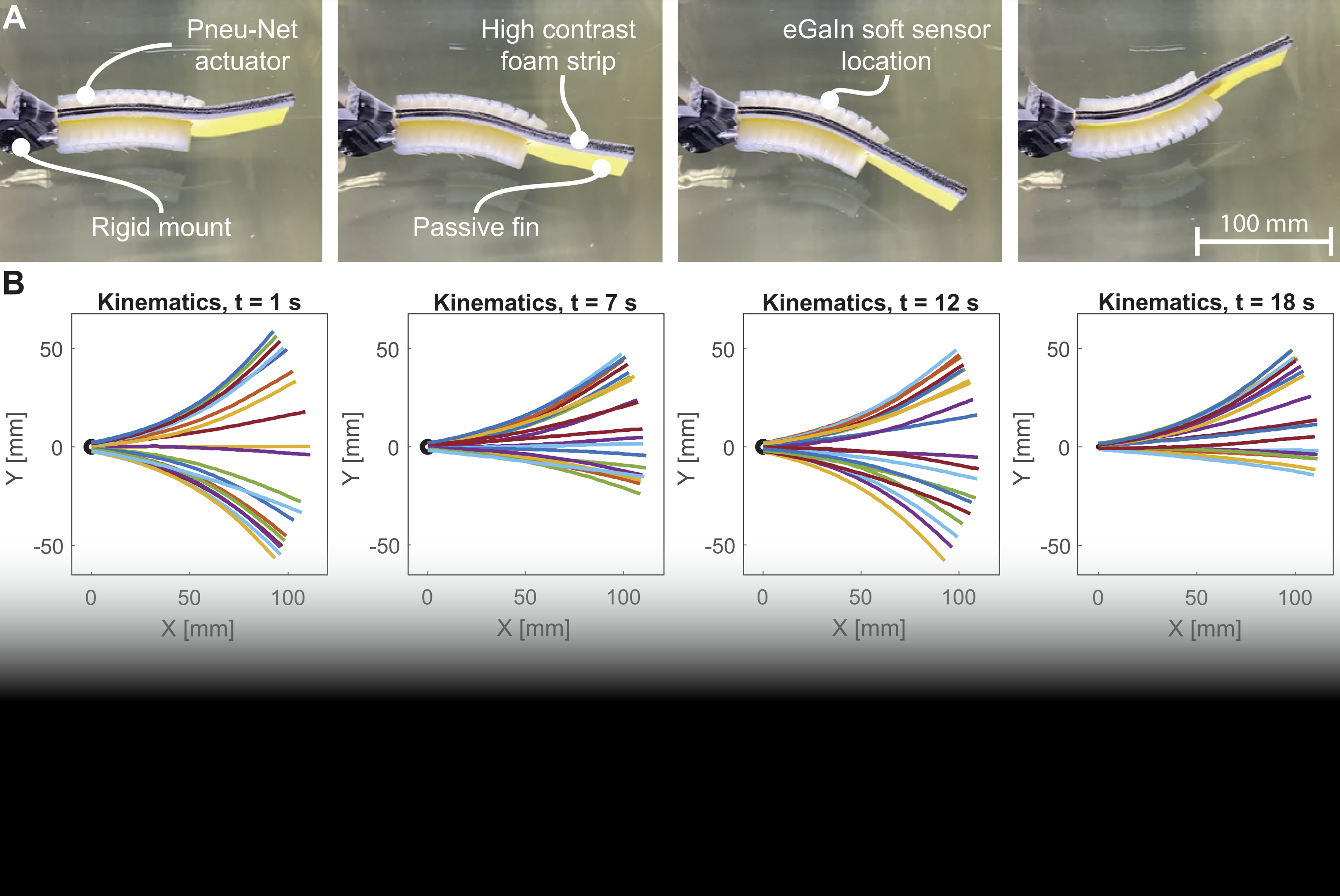
Soft robotics enables new and robust forms of robot locomotion, but needs new approaches to sensing and control. For this project I developed a model of a pneumatic
silicone fish robot, that allowed development of a stiffness controller that used a liquid metal strain sensor for feedback.
Team: Yu Hsiang Lin, Ardian Jusufi and others. Research paper available here
Buildrone
I was a part of the team that won the 2016 ‘Drones for Good’ competition in Dubai. Our entry was ‘Buildrone’ a
quadcopter that was able to repair leaks by extruding polyurethane compounds from a custom built delta mechanism manipulator.
We were awarded 1,000,000AED as a prize for winning the live demo competition. (news story)
Team: Graham Hunt, Adam Braithwaite, Talib Al-Hinai, Pisak Chermprayong, Mirko Kovac
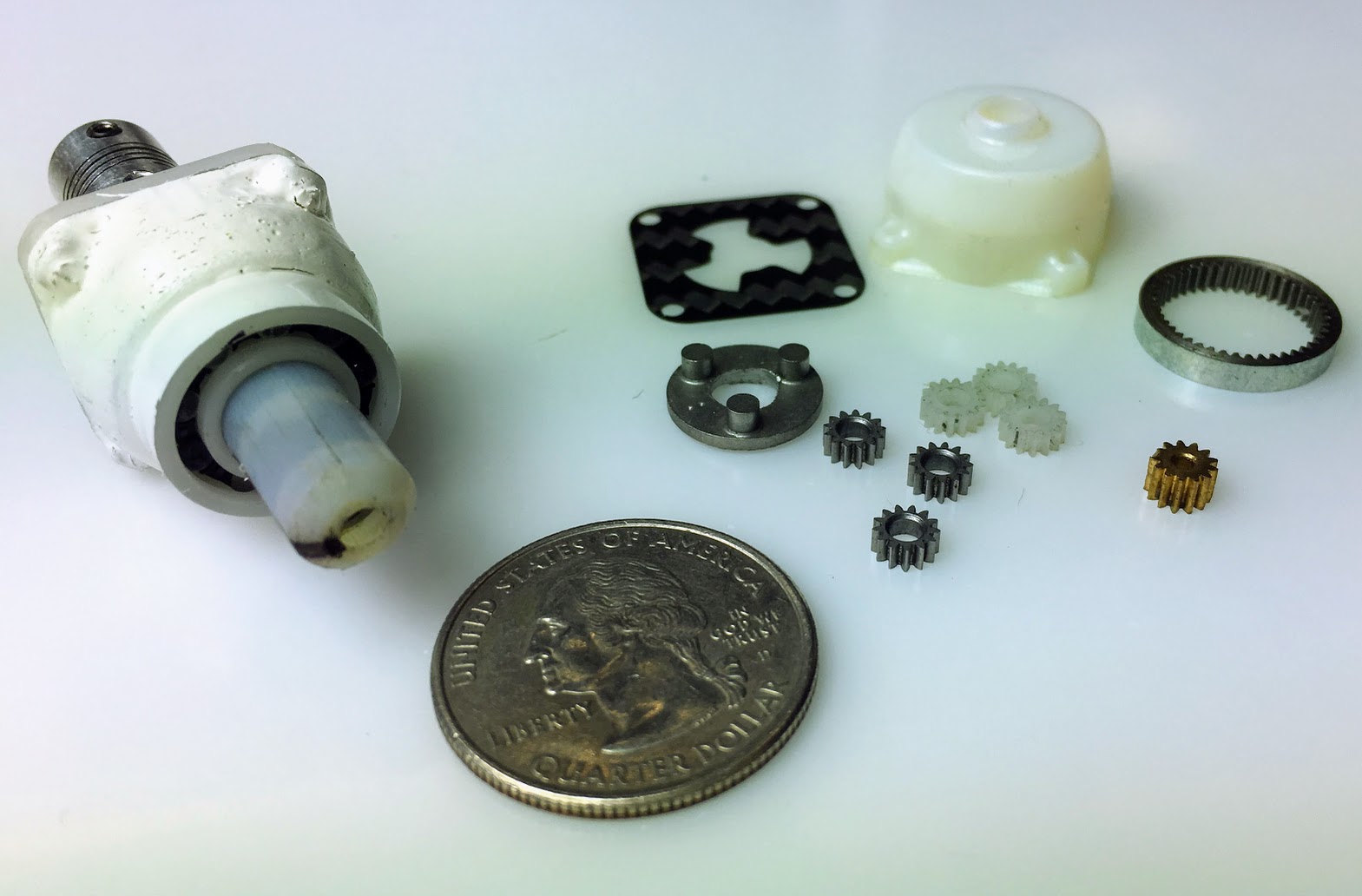
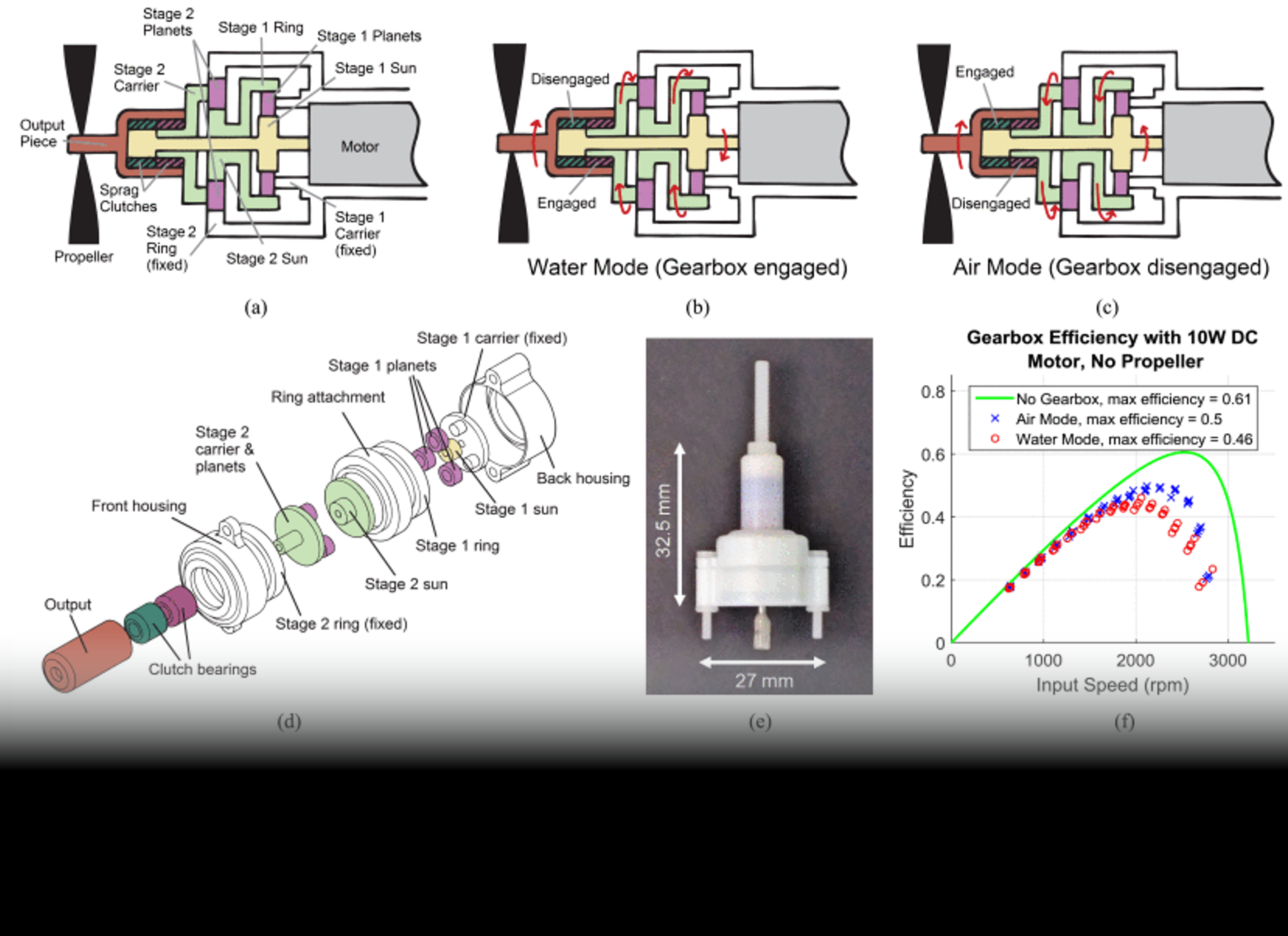
Air-Water Gearbox
Developed as part of the AquaMAV project, this gearbox lets a single motor and propeller
be efficient in both air and water without any additional actuators. (summary video).
Team: Yu Herng Tan, Mirko Kovac

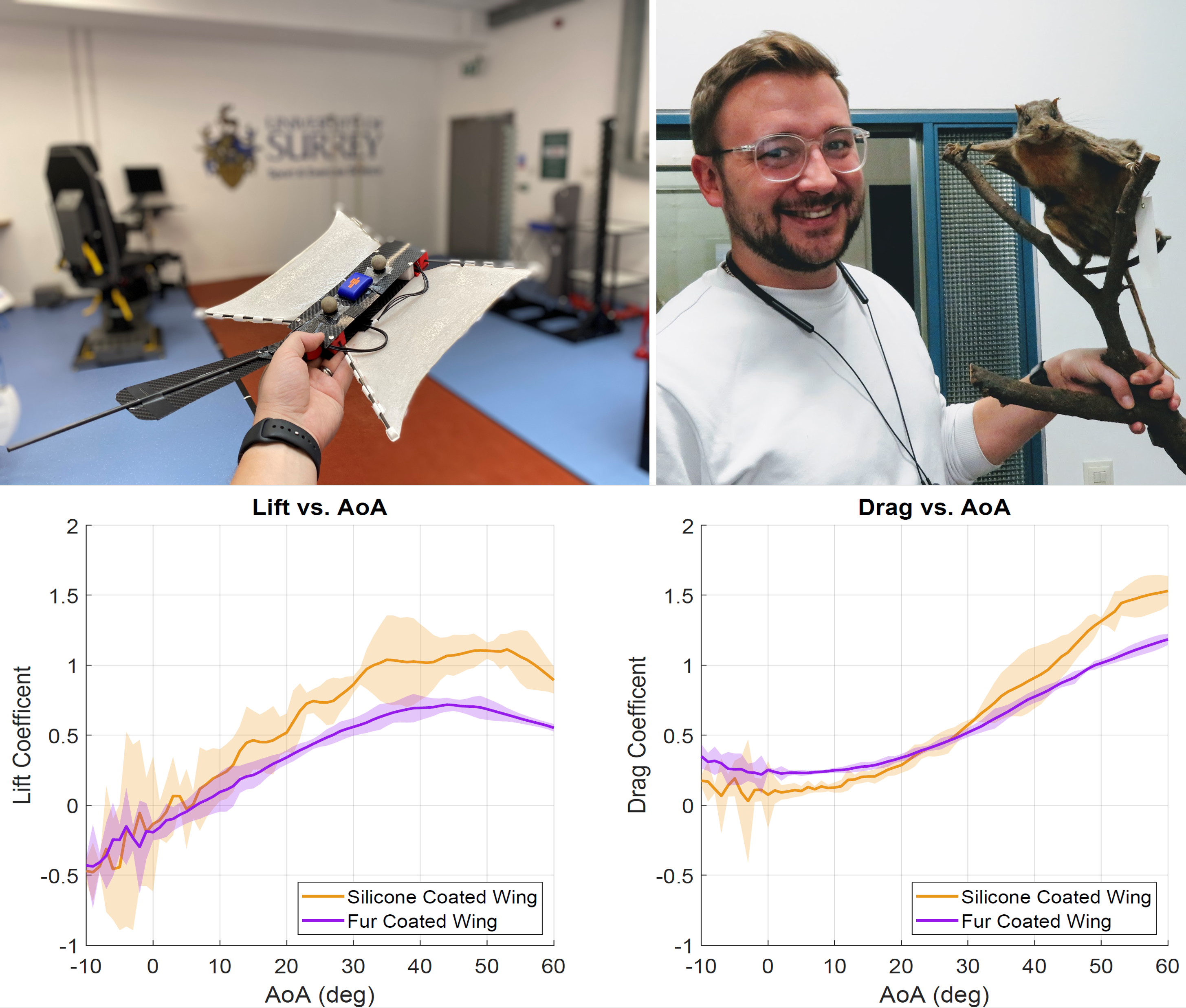
Robotic Flying Squirrel
Coming soon - a paper on low aspect ratio membrane wings, and their consequences for flight efficiency and stability.
More coming soon! (summary video)
Team: Artie Knijff

Kosmo
Kosmo is a minimalist 'robotic ecologist', designed to take biodiversity surveys of forest ecosystems. The robot can be made amphibious to cover marsh and peatland.
Team: Lizzie Sergeev, Kavin Ha, Schuyler Goodwin-Groen, Ayanah Gulfraz

Flying Squid
I've been interested in flying squid every since I tried to build one during my phd (see chapter 6), but they've been talked about as far back as ancient Rome.
I got the chance to tell the world about them in a video (1.8 million views) with the help of TED-Ed and Matt Reynolds.

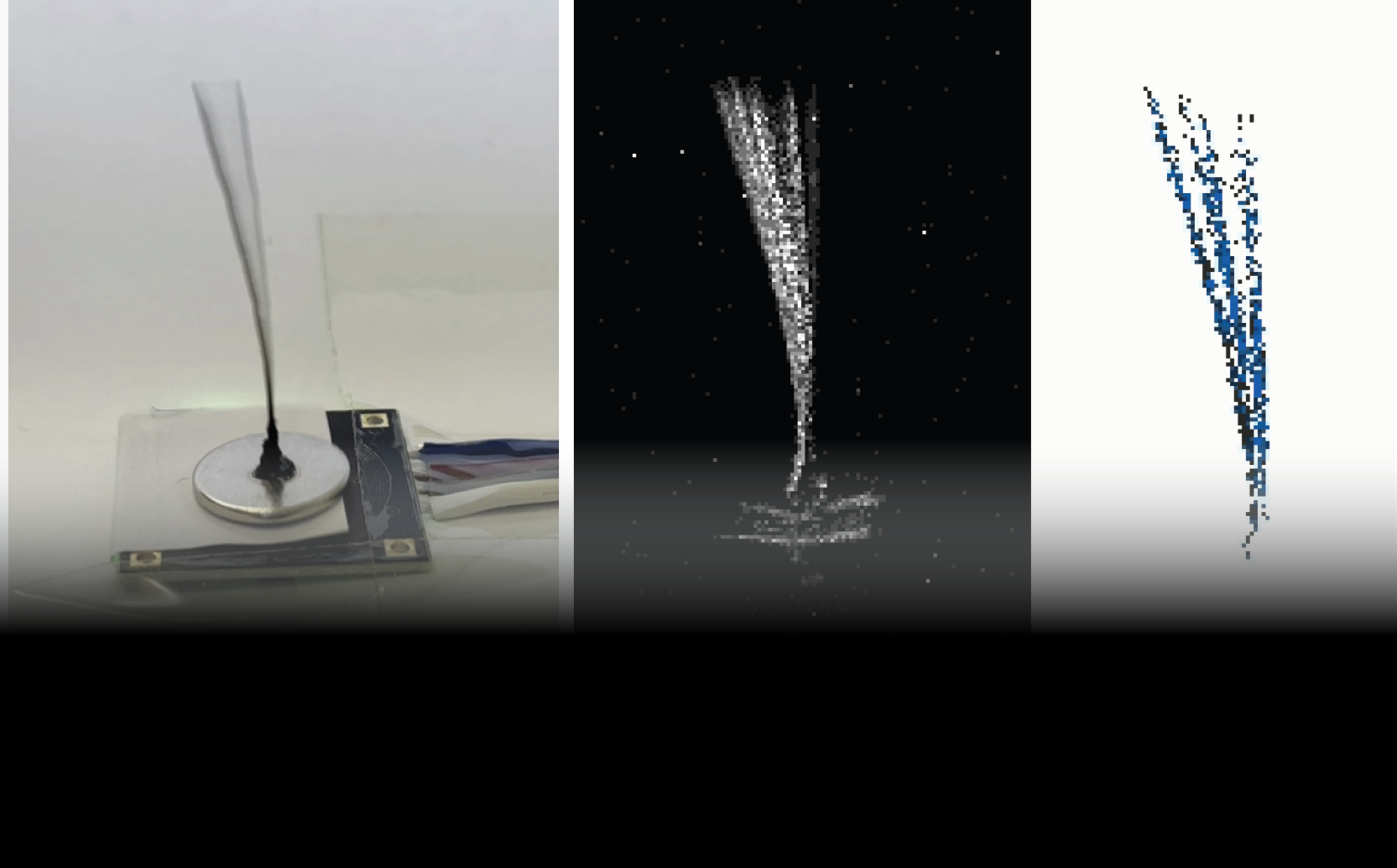
Neuromorphic Mechanosensing
Event cameras respond to changes in individual pixels rather than saving entire frames.
This allows a webcam-sized camera to observe events at millions of frames per second (for example, vibrations of small flow sensing hairs). More details coming soon...

Plantolin
Each year, I run The Natural Robotics Contest, a chance for the public to submit ideas for bioinspired robots that
we turn into a real, working robot. The winning entry in 2023 was ‘Plantolin’ a robotic pangolin that plants seeds, submitted by Dorothy Z. in California (video).

Aerodynamics of small gliding animals
The short glides observed in a variety of animals are unsteady, involving
rapid acceleration and even more rapid deceleration, which makes
for a very interesting aerodynamics problem. I've been trying to learn more by catapulting a variety of model gliders in my
lab... More coming soon! (summary video).
Crash Tolerant UAS
What happens when a plane flies into a pole? Normally nothing good, but in my lab at Surrey we have been testing ways to make aircraft more crash tolerant without
compromising aerodynamics. (summary video)
Team: Owen Wastell, Oliver Gent